|
Управление поворотом телескопа. Часть 1. (А.В.Пахомов)
Статья опубликована в журнале
"Радио" №5, 2010. В статье приводится описание
простого устройства управления поворотом телескопа Celestron PowerSeeker
60 EQ. Для вращения телескопа по полярной оси (восток-запад) используется
шаговый двигатель от старого матричного принтера. Схема управления
выполнена на микроконтроллере Atmel AT89C51.
Введение
Подаренный на день рождения ребенку простой телескоп
Celestron PowerSeeker 60 EQ [1], поднял интерес к астрономии у всех
домочадцев и многих знакомых. Но, со временем, потребности и ожидания
переросли возможности аппарата: хотелось видеть, то, на чего "сил"
6см объектива не хватает, да и постоянная подстройка направления
за "убегающми небесными объектами" надоедала. С первым желанием
- ничего не поделаешь, а вот со вторым можно справиться - автоматизировать
процесс "слежения". Реализации устранения второго недостатка посвящена
эта статья.
Постановка задачи
Отвлечемся от радиотехники и коснемся, немного,
астрономии, для вникания в суть задачи. Для установки телескопов
существуют два основных способа крепления (монтировки): азимутальная
и экваториальная. Азимутальная - простая и понятная (попросту: одна
ось: влево-вправо (азимут), другая: вверх-вниз) - очень удобно для
наблюдения за "земными" объектами. Экваториальная - несколько сложнее:
плоскость "влево-вправо" азимутальной монтировки наклоняется в соответствии
с широтой наблюдений, а ось этих поворотов направляется на север,
точнее на Полярную звезду - она становится параллельна оси Земли.
Теперь поворот "влево-вправо" будет совпадать с вращением нашей
планеты и для слежения за небесными объектами достаточно вращать
телескоп в этой плоскости (вокруг "оси прямого восхождения" (полярной
оси)). Наш телескоп [1], достаточно продвинут и имеет экваториальную
монтировку (суффикс EQ в названии), существуют модели и с азимутальной
монтировкой (суффикс AZ). Собственно, вращение по полярной оси и
должно отслеживаться разрабатываемым нами устройством. Скорость
вращения телескопа совпадает с длительностью Земных суток, т.е.
один оборот за 24 часа.
Пути решения
Для поворота телескопа в нужной нам плоскости предназначена
"Ручка механизма тонких движений по прямому восхождению". Она может
быть прикреплена к валу механизма поворота с двух сторон, таким
образом для нас остается свободным один конец вала. Сам механизм
представляет собой червячную пару. Передаточное соотношение таково,
что один оборот вала соответствует 15 минутному (если считать 24
часа на полный оборот) повороту телескопа. Т.е. вал нам надо вращать
со скоростью 4 оборота в час. Такие "тихоходные" двигатели "в природе"
существуют: я остановился на шаговом двигателе (ШД). Первая попытка
- использовать ШД от пяти-дюймового дисковода не увенчалась успехом:
без применения редуктора, мощности ШД не хватает для вращения вала
механизма поворота телескопа. Покопавшись в "отбросах старой компьютерной
техники", был найден поломаный матричный принтер Robotron CM 6329.
Изучение его внутренностей вызвало ностальгические воспоминания
о молодости: ПЗУ с УФ КР573РФ2, аналог ЦП Z80... было время! Но,
самое главное, в недрах принтера, как и ожидалось, оказались два
"тяжеленьких", с виду - одинаковых, ШД. Вид этих ШД "вызывал уважение"
и не оставлял сомнений: "уж эти-то справятся с телескопом".
Железное (механика) решение
Двигатели из принтера оказались разными. Из двух
ШД был выбран тот, у которого оказалось больше проводов для управления.
Забегая вперед, скажу, что схема управления таковым, содержит меньшее
число элементов. Выбранный ШД занимался в принтере задачей протягивания
бумаги. Чтобы не возиться с редуктором, была выбрана механическая
схема непосредственного соединения валов механизма поворота телескопа
и Двигателя. Соединение валов производится отрезком алюминиевой
трубки с внутренним диаметром 14 мм, валы зажимаются винтами М3
(Рис.1. фото механизма сопряжения вала ШД и вала поворота телескопа).

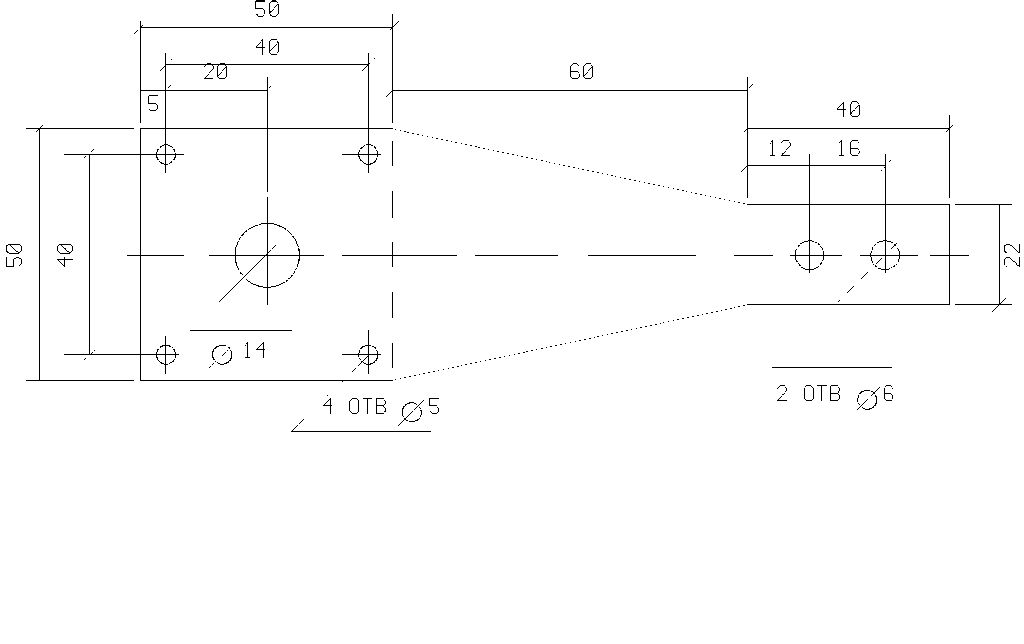
Кронштейн крепления ШД согнут из дюралюминиевой
полосы. Чертеж развертки детали приведен
на рисунке 2. По пунктирной линии деталь надо согнуть под прямым
углом. Крепление двигателя и кронштейна понятно из фото на рисунке
1. Кронштейн крепится под удачно расположенные болты крепления червячной
пары механизма поворота телескопа.
Схема
Для разработки схемы управления двигателем был
изучен имевшийся экземпляр ШД и схема управления им, выбранная немецкими
конструкторами. Немного о принципе работы ШД. По сути ШД представляет
собой ротор с закрепленным на нем постоянным магнитом и множество
электромагнитов по окружности статора. Последовательно включая электромагниты
статора, мы заставляем поворачиваться магнит ротора (он притягивается
к очередному включенному электромагниту). Научное и достаточно полное
описание работы ШД можно найти в Интернете, например [2,3]. Выбранный
нами ШД - это униполярный двигатель 100 шагов на оборот. Сопротивление
каждой из четырех обмоток постоянному току 18 Ом. (Второй ШД из
принтера - биполярный, 60 шагов на оборот). Питание обмоток ШД в
принтере осуществляется от источника 36В через транзисторный ключ
и широтно-импульсный стабилизатор. Средний ток в обмотке порядка
100 мА, в пике - 1А. Принципиальная
схема устройства управления поворотом телескопа показана на рисунке
3. По сравнению с Robotron-овской упрощена схема управления
обмотками ШД: исключен стабилизатор. Питание устройства осуществляется
от источника питания старого ноутбука (19В, 2А). Микроконтроллер
DD1 (МК) был выбран в качестве управляющего элемента с точки зрения
упрощения схемы (в принципе, задачи контроллера может выполнить
связка генератор - счетчик на КМОП микросхемах) и получения гибкости
при реализации разных алгоритмов управления ШД. Базы маломощных
транзисторов ключей VT1-VT4 подключены напрямую к выводам порта
Р1 МК, включение питания на обмотку ШД производится логической единицей
на выходе порта. Мощные транзисторы ключей VT5-VT8 взяты из того
же Robotrona. Диоды VD2-VD5, подключенные параллельно обмоткам ШД,
необходимы для подавления импульсов обратного напряжения, формируемых
обмотками двигателя в момент снятия питания. Стабилизатор напряжения
DD2 формирует 5В, необходимые для питания МК. В принципе, ток потребления
МК настолько мал, что, в данном случае, возможно применение простого
параметрического стабилизатора на стабилитроне КС147 или КС156.
Стабилитрон VD6 используется для гашения "лишнего" напряжения на
входе стабилизатора. Схемы сброса и синхронизации МК - типовые.
В качестве кварцевого резонатора применен кварц с "древней" материнской
платы компьютера (такие же стоят на старых видео- и мульти- картах).
Контрольный светодиод VD1 подключен напрямую к выводу порта Р0 (как
самого "мощного"). Управление устройством осуществляется с помощью
трех кнопок: S1 (Сброс/Слежение), S2 (Стоп/Поворот вправо) и S3
(Стоп/поворот влево). Перемычки SW1-SW3 используются для изменения
режима работы управляющей программы в МК. О деталях: микроконтроллер
- любой MCS-51 с двумя таймерами и достаточным числом выводов, возможно
придется скорректировать программу и/или схему, например, для 20
выводных микросхем. Маломощные транзисторы - любые n-p-n с допустимым
напряжением коллектор - эмиттер более 25В. Мощные транзисторы -
BD136,BD138,BD140 или "наши" КТ814 или КТ816. Применены диоды с
максимальным током 1А и обратным напряжением 120В.
Программа
Коды программы МК приведены
в таблице 1. Текст программы микроконтроллера
на ассемблере MCS-51 - в таблице 2. Программа работает следующим
образом. После нажатия кнопки S1 (Сброс/Слежение) программа начинает
формировать на выводах порта 1 сигналы управления ШД, обеспечивающие
его вращение с требуемой скоростью. Конкретный режим управления
ШД зависит от состояния перемычек SW1-SW3 и описан в таблице 3.
| Перемычка |
Состояние перемычки |
Режим работы устройства управления
телескопом |
| SW1 "Switch" |
установлена (Р3.2=0) |
Ускоренное вращение телескопа
независимо от нажатия S2 или S3 |
| отсутствует (Р3.2=1) |
Слежение с расчетными параметрами
|
| SW2 "Direct" |
установлена (Р3.4=0) |
Обратное расчетному направление
движения при слежении |
| отсутствует (Р3.4=1) |
Расчетное направление движения
при слежении |
| SW3 "Step" |
установлена (Р3.5=0) |
Режим управления ШД "по шагам"
- 100 шагов на оборот |
| отсутствует (Р3.5=1) |
Режим управления ШД "полушаги"
- 200 полушагов на оборот |
"По умолчанию" все перемычки сняты, что соответствует
вращению "по часовой стрелке" со скоростью 4 оборота в час в режиме
работы ШД "полушаги" (200 полушагов на оборот), т.е. каждые 4,5
сек двигатель чуть сдвигает телескоп "вслед за Солнцем". Следует
отметить особенность подачи питания на ШД. Если просто включать
транзисторный ключ на все время шага (полушага), то через несколько
секунд температура транзистора превысит допустимую. Поэтому применен
режим импульсного питания обмотки ШД: первые 12,5 мс после сдвига
ротора на обмотку непрерывно подается питание, далее, до следующего
сдвига, питание подается импульсами (50 мкс имульс, 150 мкс - пауза).
Совсем снимать питание с обмотки после сдвига ротора - нельзя: из-за
упругости соединения валов двигателя и "механики телескопа", вал
двигателя может вернуться в прежнее положение. Большее значение
скважности импульсов также не удерживает вал ШД - наблюдаются периодические
"проскальзывания". Всеми временными характеристиками управления
ШД в МК занимаются оба его таймера. Таймер 0 вырабатывает прерывания
с периодом 25 мс и, собственно, определяет скорость вращения вала
ШД. Таймер 1 вызывает прерывания с периодичностью 50 мкс и обеспечивает
импульсное питание обмоток ШД. При применении кварцевого резонатора
с иной частотой, следует пересчитать загружаемые в таймеры константы.
После нажатия любой из кнопок S2 или S3, прекращается подача питания
на ШД, запрещается обработка прерываний. В это время можно вручную,
ручкой механизма тонких движений по прямому восхождению (той, что
приделана к вращаемому ШД валу) подстроить телескоп. При работе
ШД этого сделать не удастся, т.к. двигатель "прочно" удерживает
положение вала. Последующие нажатия кнопок S2 или S3 вызывают ускоренный
поворот телескопа в ту ли другую сторону. Продолжить режим слежения
можно сбросом программы кнопкой S1. В программу введен дополнительный
режим начальной настройки. При нажатой кнопке S2 сброс по кнопке
S1 приводит к смене значения перемычки SW3 "Step" на обратное, например,
при отсутствии Sw3 включается режим "шагов" (100 шагов на оборот)
и коррекция положения телескопа производится каждые 9 секунд. Аналогично,
при нажатой кнопке S3 сброс по кнопке S1 приводит к смене значения
перемычки SW2 "Direct" на обратное, например, при отсутствии Sw2
включается обратное расчетному направление движения при слежении.
Монтаж
Для устройства управления телескопом плата специально
не разрабатывалась. Монтаж выполнен на макетной плате. Плата с элементами
установлена в корпусе от монтажной распределительной коробки (80х80
мм) - рисунок 4.
Коробка крепится к центральной стяжке штатива (рис.
5) либо к кронштейну с ШД.

В качестве разъема Х2 для подключения ШД используется
6-ти контактный отрезок разъема с шлейфом для подключения флоппи-дисковода
в компьютере и штатный 6-ти контактный разъем ШД. Разъем не имеет
ключа, поэтому при неверном подключении может наблюдаться обратное
вращение ШД. Питание подается на устройство через разъем Х1, закрепленный
на стенке коробки.
Работа с оборудованием
Работа с доработанным телескопом происходит следующим
образом. Сначала в полном соответствии с [1] выполняется сборка
и настройка экваториальной монтировки телескопа. Затем производится
ручная настройка телескопа на наблюдаемый на небе объект. Далее
подается питание на устройство управления и телескоп будет сам вести
объект вслед за вращением Земли. Светодиод мигает равномерно медленно.
При необходимости ручной подстройки "право-лево" (точнее "восток-запад"),
нажимаем любую из кнопок S2 или S3. При этом останавливается слежение,
снимается питание с ШД, освобождая, тем самым, ручку управления
для ручных манипуляций. Светодиод при этом перестает мигать и остается
в своем последнем (до нажатия кнопок) состоянии. Повернуть телескоп
в управляемой плоскости можно повторными нажатиями кнопок S2 или
S3 к востоку или западу, при этом контрольный светодиод мигает чаще.
При отпускании кнопок питание с ШД вновь снимается. Работа второй
ручки телескопа - ручки механизма тонких движений по склонению нашим
устройством не блокируется. Ручка доступна для ручного управления
в заданных конструкцией телескопа пределах.
Выводы
Конечно, на достигнутом грех останавливаться, ведь
у нас остался второй ШД, масса неиспользованных ресурсов МК и незадействованная
вторая ручка управления телескопом... МК можно связать по USB с
ноутбуком, к окуляру пристроить Web-камеру, и ... пущай комары и
холод останутся на улице, а мы сидя дома будем дистанционно наблюдать
за небом (прямо "домашний Хаббл"). Но, о реальном: все бы хорошо,
но есть несколько недостатков. Прежде всего питание: приходится
тянуть 220В на улицу, а это неудобно. Требуется проверка работоспособности
ШД при пониженном (хотябы автомобильный аккумулятор) питании. Ну
и, конечно, писк при работе ШД: основную массу времени на обмотки
ШД идут импульсы с частотой 5 КГц, а ухо это уже слышит. По изменению
тембра этого писка можно следить за переключением обмоток. Устранить
это можно изменением периода прерываний от таймера 1 или скважности
импульсов, например, при подаче импульсов 50 мкс и 50 мкс пауза
- все работает, писка нет (10КГц), но транзисторы ужасно греются.
Так что перспективы есть - дерзайте!
Список литературы:
1. Телескоп PowerSeeker 60 EQ. Инструкция по эксплуатации.
- http://www.celestron.ru/support/powerseeker_60eq.pdf
2. Управление фазами шагового двигателя. - http://www.texnologia.ru/development/stepper_motor/stepper_motor_management_of_phases_engine.html
3. Шаговые двигатели: принципы работы... - http://www.eprivod.ru/stmotor.htm
|

{kind=link}
{kind=link}